
RFQ Preparation Checklist
- Define target layer/path precision and motion speed
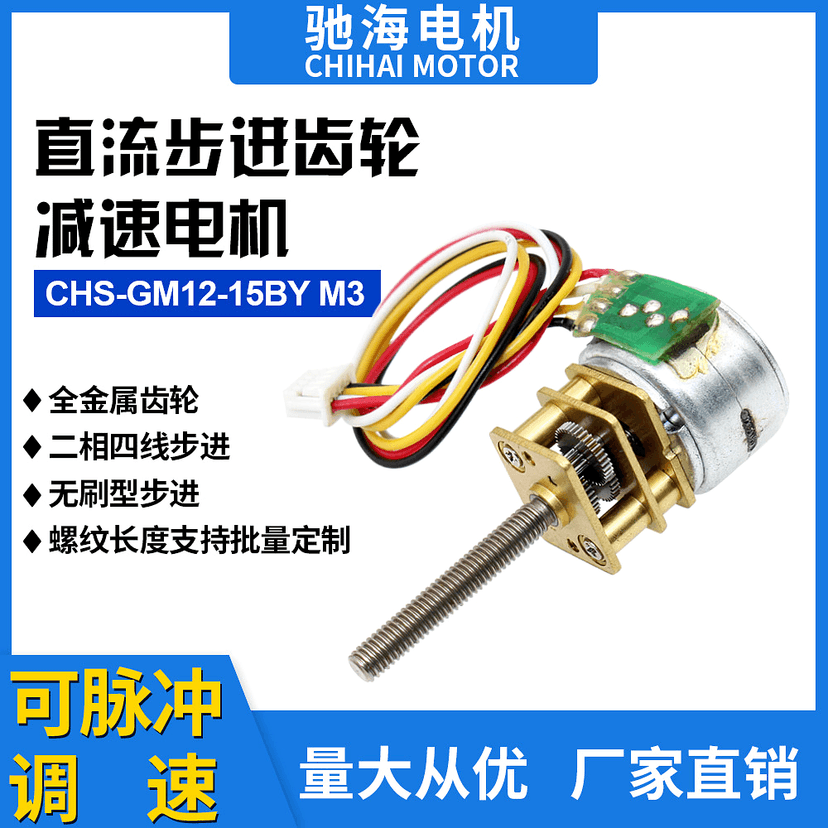
- Provide axis mass and acceleration requirements
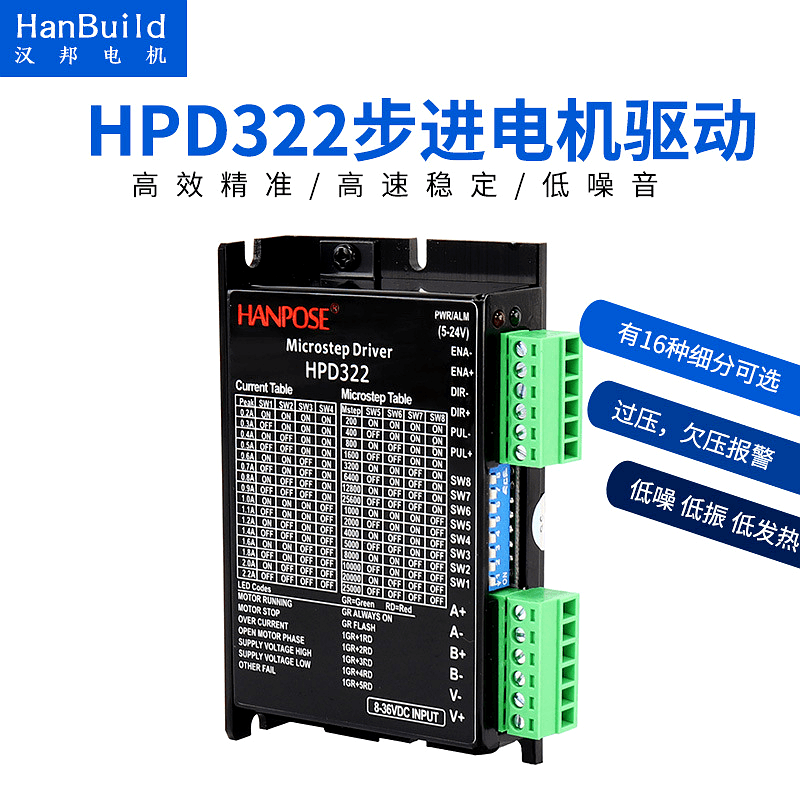
- List controller/firmware ecosystem and interface constraints
- Specify acoustic/noise expectations if relevant
Stepper-based motion architecture for additive manufacturing platforms and robotic automation.

| Evaluation Metric | Typical Range | Buyer Relevance |
|---|---|---|
| Motion smoothness priority | High for print quality and robotic path tracking | Directly affects output quality and path consistency. |
| Moving-axis mass class | Light to medium with rapid directional changes | Determines acceleration reserve and motor sizing. |
| Feedback requirement | Open-loop to encoder-assisted closed-loop | Controls reliability under high dynamic duty. |
| Cable/harness strategy | Flexible cable routing with strain relief | Avoids intermittent signal failures in field use. |

Not always. Closed-loop is recommended when missed-step risk or load disturbance is high.
Proper motor-driver tuning with matched inertia and current strategy usually gives the largest improvement.
Yes. We can support sample builds, validation feedback, and mass production execution.
Inquiry Email